3.1. Implementation¶
CICE is written in FORTRAN90 and runs on platforms using UNIX, LINUX, and other operating systems. The code is based on a two-dimensional horizontal orthogonal grid that is broken into two-dimensional horizontal blocks and parallelized over blocks with MPI and OpenMP threads. The code also includes some optimizations for vector architectures.
CICE consists of source code under the cicecore/ directory that supports model dynamics and top-level control. The column physics source code is under the Icepack directory and this is implemented as a submodule in github from a separate repository (CICE <https://github.com/CICE-Consortium/CICE>) There is also a configuration/ directory that includes scripts for configuring CICE cases.
3.1.1. Directory structure¶
The present code distribution includes source code and scripts. Forcing data is available from the ftp site. The directory structure of CICE is as follows
- LICENSE.pdf
- license and policy for using and sharing the code
- DistributionPolicy.pdf
- license and policy for using and sharing the code
- README.md
- basic information and pointers
- icepack/
- subdirectory for the Icepack model. The Icepack subdirectory includes Icepack specific scripts, drivers, and documentation. CICE only uses the columnphysics source code under icepack/columnphysics/.
- cicecore/
- directory for CICE source code.
- cicecore/cicedynB/
- directory for routines associated with the dynamics core.
- cicecore/driver/
- directory for top level CICE drivers and coupling layers.
- cicecore/shared/
- directory for CICE source code that is independent of the dynamical core.
- cicecore/version.txt
- file that indicates the CICE model version.
- configuration/scripts/
- directory of support scripts, see Scripts Implementation
- doc/
- documentation
- cice.setup
- main CICE script for creating cases
A case (compile) directory is created upon initial execution of the script
icepack.setup at the user-specified location provided after the -c flag.
Executing the command ./icepack.setup -h provides helpful information for
this tool.
3.1.2. Grid, boundary conditions and masks¶
The spatial discretization is specialized for a generalized orthogonal B-grid as in [54] or [67]. The ice and snow area, volume and energy are given at the center of the cell, velocity is defined at the corners, and the internal ice stress tensor takes four different values within a grid cell; bilinear approximations are used for the stress tensor and the ice velocity across the cell, as described in [34]. This tends to avoid the grid decoupling problems associated with the B-grid. EVP is available on the C-grid through the MITgcm code distribution, http://mitgcm.org/viewvc/MITgcm/MITgcm/pkg/seaice/.
Since ice thickness and thermodynamic variables such as temperature are given in the center of each cell, the grid cells are referred to as “T cells.” We also occasionally refer to “U cells,” which are centered on the northeast corner of the corresponding T cells and have velocity in the center of each. The velocity components are aligned along grid lines.
The user has several choices of grid routines: popgrid reads grid lengths and other parameters for a nonuniform grid (including tripole and regional grids), and rectgrid creates a regular rectangular grid, including that used for the column configuration. The input files global_gx3.grid and global_gx3.kmt contain the \(\left<3^\circ\right>\) POP grid and land mask; global_gx1.grid and global_gx1.kmt contain the \(\left<1^\circ\right>\) grid and land mask. These are binary unformatted, direct access files produced on an SGI (Big Endian). If you are using an incompatible (Little Endian) architecture, choose rectangular instead of displaced_pole in ice_in, or follow procedures as for conejo (\(\langle\)OS\(\rangle.\langle\)SITE\(\rangle.\langle\)machine\(\rangle\) = Linux.LANL.conejo). There are versions of the gx3 grid files available.
In CESM, the sea ice model may exchange coupling fluxes using a different grid than the computational grid. This functionality is activated using the namelist variable gridcpl_file.
3.1.2.1. Grid domains and blocks¶
In general, the global gridded domain is nx_global \(\times\)ny_global, while the subdomains used in the block distribution are nx_block \(\times\)ny_block. The physical portion of a subdomain is indexed as [ilo:ihi, jlo:jhi], with nghost “ghost” or “halo” cells outside the domain used for boundary conditions. These parameters are illustrated in Figure 8 in one dimension. The routines global_scatter and global_gather distribute information from the global domain to the local domains and back, respectively. If MPI is not being used for grid decomposition in the ice model, these routines simply adjust the indexing on the global domain to the single, local domain index coordinates. Although we recommend that the user choose the local domains so that the global domain is evenly divided, if this is not possible then the furthest east and/or north blocks will contain nonphysical points (“padding”). These points are excluded from the computation domain and have little effect on model performance.
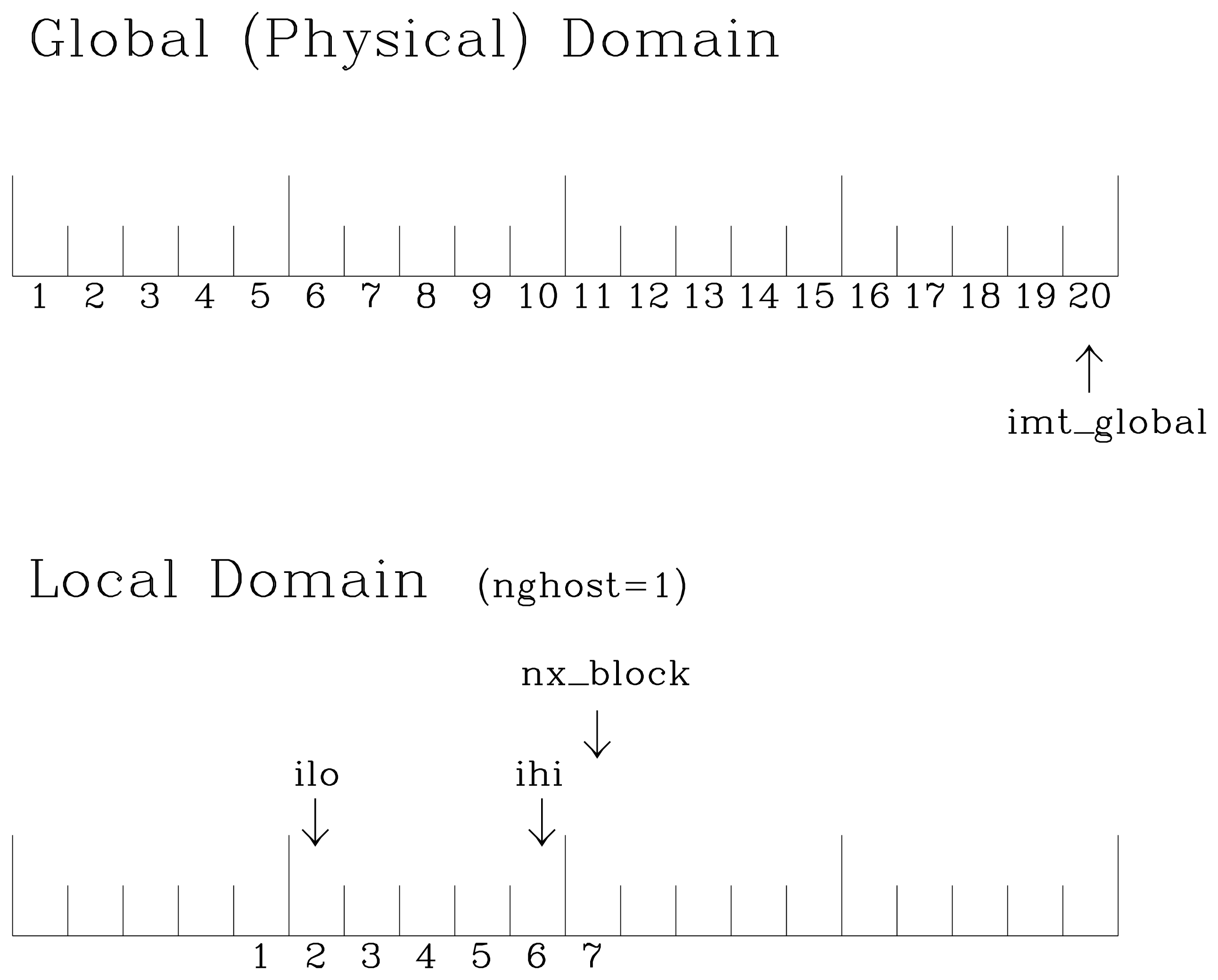
Figure 8
Figure 8 : Grid parameters for a sample one-dimensional, 20-cell global domain decomposed into four local subdomains. Each local domain has one ghost (halo) cell on each side, and the physical portion of the local domains are labeled ilo:ihi. The parameter nx_block is the total number of cells in the local domain, including ghost cells, and the same numbering system is applied to each of the four subdomains.
The user chooses a block size BLCKX \(\times\)BLCKY and the number of processors NTASK in comp_ice. Parameters in the domain_nml namelist in ice_in determine how the blocks are distributed across the processors, and how the processors are distributed across the grid domain. Recommended combinations of these parameters for best performance are given in Section Performance. The script comp_ice computes the maximum number of blocks on each processor for typical Cartesian distributions, but for non-Cartesian cases MXBLCKS may need to be set in the script. The code will print this information to the log file before aborting, and the user will need to adjust MXBLCKS in comp_ice and recompile. The code will also print a warning if the maximum number of blocks is too large. Although this is not fatal, it does require excess memory.
A loop at the end of routine create_blocks in module ice_blocks.F90 will print the locations for all of the blocks on the global grid if dbug is set to be true. Likewise, a similar loop at the end of routine create_local_block_ids in module ice_distribution.F90 will print the processor and local block number for each block. With this information, the grid decomposition into processors and blocks can be ascertained. The dbug flag must be manually set in the code in each case (independently of the dbug flag in ice_in), as there may be hundreds or thousands of blocks to print and this information should be needed only rarely. This information is much easier to look at using a debugger such as Totalview.
Alternatively, a new variable is provided in the history files, blkmask, which labels the blocks in the grid decomposition according to blkmask = my_task + iblk/100.
3.1.2.2. Tripole grids¶
The tripole grid is a device for constructing a global grid with a normal south pole and southern boundary condition, which avoids placing a physical boundary or grid singularity in the Arctic Ocean. Instead of a single north pole, it has two “poles” in the north, both located on land, with a line of grid points between them. This line of points is called the “fold,” and it is the “top row” of the physical grid. One pole is at the left-hand end of the top row, and the other is in the middle of the row. The grid is constructed by “folding” the top row, so that the left-hand half and the right-hand half of it coincide. Two choices for constructing the tripole grid are available. The one first introduced to CICE is called “U-fold”, which means that the poles and the grid cells between them are U cells on the grid. Alternatively the poles and the cells between them can be grid T cells, making a “T-fold.” Both of these options are also supported by the OPA/NEMO ocean model, which calls the U-fold an “f-fold” (because it uses the Arakawa C-grid in which U cells are on T-rows). The choice of tripole grid is given by the namelist variable ns_boundary_type, ‘tripole’ for the U-fold and ‘tripoleT’ for the T-fold grid.
In the U-fold tripole grid, the poles have U-index \({\tt nx\_global}/2\) and nx_global on the top U-row of the physical grid, and points with U-index i and \({\tt nx\_global-i}\) are coincident. Let the fold have U-row index \(n\) on the global grid; this will also be the T-row index of the T-row to the south of the fold. There are ghost (halo) T- and U-rows to the north, beyond the fold, on the logical grid. The point with index i along the ghost T-row of index \(n+1\) physically coincides with point \({\tt nx\_global}-{\tt i}+1\) on the T-row of index \(n\). The ghost U-row of index \(n+1\) physically coincides with the U-row of index \(n-1\).
In the T-fold tripole grid, the poles have T-index 1 and and \({\tt nx\_global}/2+1\) on the top T-row of the physical grid, and points with T-index i and \({\tt nx\_global}-{\tt i}+2\) are coincident. Let the fold have T-row index \(n\) on the global grid. It is usual for the northernmost row of the physical domain to be a U-row, but in the case of the T-fold, the U-row of index \(n\) is “beyond” the fold; although it is not a ghost row, it is not physically independent, because it coincides with U-row \(n-1\), and it therefore has to be treated like a ghost row. Points i on U-row \(n\) coincides with \({\tt nx\_global}-{\tt i}+1\) on U-row \(n-1\). There are still ghost T- and U-rows \(n+1\) to the north of U-row \(n\). Ghost T-row \(n+1\) coincides with T-row \(n-1\), and ghost U-row \(n+1\) coincides with U-row \(n-2\).
The tripole grid thus requires two special kinds of treatment for certain rows, arranged by the halo-update routines. First, within rows along the fold, coincident points must always have the same value. This is achieved by averaging them in pairs. Second, values for ghost rows and the “quasi-ghost” U-row on the T-fold grid are reflected copies of the coincident physical rows. Both operations involve the tripole buffer, which is used to assemble the data for the affected rows. Special treatment is also required in the scattering routine, and when computing global sums one of each pair of coincident points has to be excluded.
3.1.2.3. Bio-grid¶
The bio-grid is a vertical grid used for solving the brine height variable \(h_b\). In the future, it will also be used for discretizing the vertical transport equations of biogeochemical tracers. The bio-grid is a non-dimensional vertical grid which takes the value zero at \(h_b\) and one at the ice–ocean interface. The number of grid levels is specified during compilation in comp_ice by setting the variable NBGCLYR equal to an integer (\(n_b\)) .
Ice tracers and microstructural properties defined on the bio-grid are referenced in two ways: as bgrid \(=n_b+2\) points and as igrid\(=n_b+1\) points. For both bgrid and igrid, the first and last points reference \(h_b\) and the ice–ocean interface, respectively, and so take the values \(0\) and \(1\), respectively. For bgrid, the interior points \([2, n_b+1]\) are spaced at \(1/n_b\) intervals beginning with bgrid(2) :math:` = 1/(2n_b)`. The igrid interior points \([2, n_b]\) are also equidistant with the same spacing, but physically coincide with points midway between those of bgrid.
3.1.2.4. Column configuration¶
A column modeling capability is available. Because of the boundary conditions and other spatial assumptions in the model, this is not a single column, but a small array of columns (minimum grid size is 5x5). However, the code is set up so that only the single, central column is used (all other columns are designated as land). The column is located near Barrow (71.35N, 156.5W). Options for choosing the column configuration are given in comp_ice (choose RES col) and in the namelist file, input_templates/col/ice_in. Here, istep0 and the initial conditions are set such that the run begins September 1 with no ice. The grid type is rectangular, dynamics are turned off (kdyn = 0) and one processor is used.
History variables available for column output are ice and snow temperature, Tinz and Tsnz. These variables also include thickness category as a fourth dimension.
3.1.2.5. Boundary conditions¶
Much of the infrastructure used in CICE, including the boundary routines, is adopted from POP. The boundary routines perform boundary communications among processors when MPI is in use and among blocks whenever there is more than one block per processor.
Open/cyclic boundary conditions are the default in CICE; the physical domain can still be closed using the land mask. In our bipolar, displaced-pole grids, one row of grid cells along the north and south boundaries is located on land, and along east/west domain boundaries not masked by land, periodic conditions wrap the domain around the globe. CICE can be run on regional grids with open boundary conditions; except for variables describing grid lengths, non-land halo cells along the grid edge must be filled by restoring them to specified values. The namelist variable restore_ice turns this functionality on and off; the restoring timescale trestore may be used (it is also used for restoring ocean sea surface temperature in stand-alone ice runs). This implementation is only intended to provide the “hooks” for a more sophisticated treatment; the rectangular grid option can be used to test this configuration. The ‘displaced_pole’ grid option should not be used unless the regional grid contains land all along the north and south boundaries. The current form of the boundary condition routines does not allow Neumann boundary conditions, which must be set explicitly. This has been done in an unreleased branch of the code; contact Elizabeth for more information.
For exact restarts using restoring, set restart_ext = true in namelist to use the extended-grid subroutines.
On tripole grids, the order of operations used for calculating elements of the stress tensor can differ on either side of the fold, leading to round-off differences. Although restarts using the extended grid routines are exact for a given run, the solution will differ from another run in which restarts are written at different times. For this reason, explicit halo updates of the stress tensor are implemented for the tripole grid, both within the dynamics calculation and for restarts. This has not been implemented yet for tripoleT grids, pending further testing.
3.1.2.6. Masks¶
A land mask hm (\(M_h\)) is specified in the cell centers, with 0 representing land and 1 representing ocean cells. A corresponding mask uvm (\(M_u\)) for velocity and other corner quantities is given by
The logical masks tmask and umask (which correspond to the real masks hm and uvm, respectively) are useful in conditional statements.
In addition to the land masks, two other masks are implemented in evp_prep in order to reduce the dynamics component’s work on a global grid. At each time step the logical masks ice_tmask and ice_umask are determined from the current ice extent, such that they have the value “true” wherever ice exists. They also include a border of cells around the ice pack for numerical purposes. These masks are used in the dynamics component to prevent unnecessary calculations on grid points where there is no ice. They are not used in the thermodynamics component, so that ice may form in previously ice-free cells. Like the land masks hm and uvm, the ice extent masks ice_tmask and ice_umask are for T cells and U cells, respectively.
Improved parallel performance may result from utilizing halo masks for boundary updates of the full ice state, incremental remapping transport, or for EVP or EAP dynamics. These options are accessed through the logical namelist flags maskhalo_bound, maskhalo_remap, and maskhalo_dyn, respectively. Only the halo cells containing needed information are communicated.
Two additional masks are created for the user’s convenience: lmask_n and lmask_s can be used to compute or write data only for the northern or southern hemispheres, respectively. Special constants (spval and spval_dbl, each equal to \(10^{30}\)) are used to indicate land points in the history files and diagnostics.
3.1.2.7. Performance¶
Namelist options (domain_nml) provide considerable flexibility for finding the most efficient processor and block configuration. Some of these choices are illustration in Figure 9. processor_shape chooses between tall, thin processor domains (slenderX1 or slenderX2, often better for sea ice simulations on global grids where nearly all of the work is at the top and bottom of the grid with little to do in between) and close-to-square domains, which maximize the volume to surface ratio (and therefore on-processor computations to message passing, if there were ice in every grid cell). In cases where the number of processors is not a perfect square (4, 9, 16…), the processor_shape namelist variable allows the user to choose how the processors are arranged. Here again, it is better in the sea ice model to have more processors in x than in y, for example, 8 processors arranged 4x2 (square-ice) rather than 2x4 (square-pop). The latter option is offered for direct-communication compatibility with POP, in which this is the default.
The user provides the total number of processors and the block dimensions in the setup script (comp_ice). When moving toward smaller, more numerous blocks, there is a point where the code becomes less efficient; blocks should not have fewer than about 20 grid cells in each direction. Squarish blocks optimize the volume-to-surface ratio for communications.
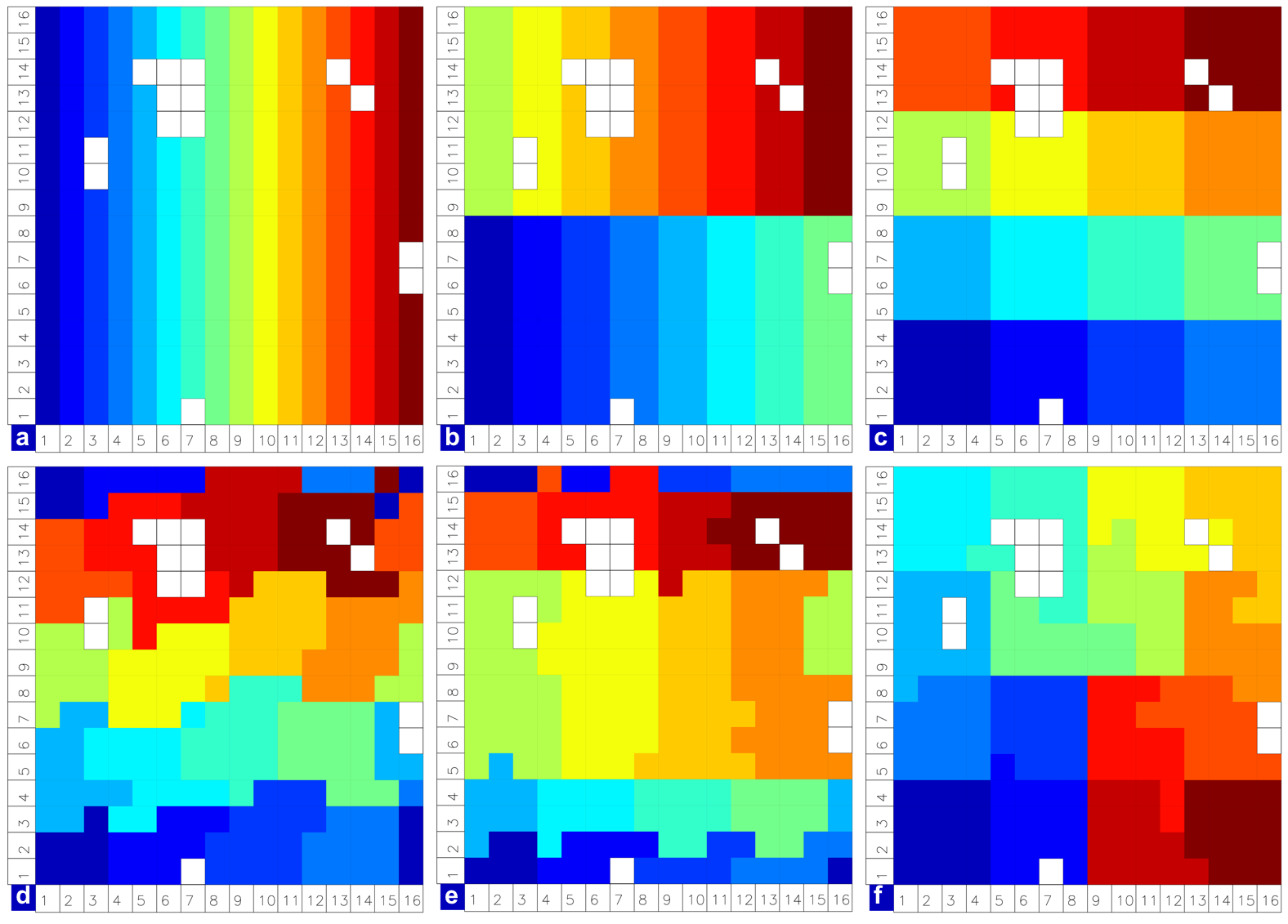
Figure 9
Figure 9 : Distribution of 256 blocks across 16 processors, represented by colors, on the gx1 grid: (a) cartesian, slenderX1, (b) cartesian, slenderX2, (c) cartesian, square-ice (square-pop is equivalent here), (d) rake with block weighting, (e) rake with latitude weighting, (f) spacecurve. Each block consists of 20x24 grid cells, and white blocks consist entirely of land cells.
The distribution_type options allow standard Cartesian distribution of blocks, redistribution via a ‘rake’ algorithm for improved load balancing across processors, and redistribution based on space-filling curves. There are also three additional distribution types (‘roundrobin,’ ‘sectrobin,’ ‘sectcart’) that improve land-block elimination rates and also allow more flexibility in the number of processors used. The rake and space-filling curve algorithms are primarily helpful when using squarish processor domains where some processors (located near the equator) would otherwise have little work to do. Processor domains need not be rectangular, however.
distribution_wght chooses how the work-per-block estimates are weighted. The ‘block’ option is the default in POP, which uses a lot of array syntax requiring calculations over entire blocks (whether or not land is present), and is provided here for direct-communication compatibility with POP. The ‘latitude’ option weights the blocks based on latitude and the number of ocean grid cells they contain.
The rake distribution type is initialized as a standard, Cartesian distribution. Using the work-per-block estimates, blocks are “raked” onto neighboring processors as needed to improve load balancing characteristics among processors, first in the x direction and then in y.
Space-filling curves reduce a multi-dimensional space (2D, in our case) to one dimension. The curve is composed of a string of blocks that is snipped into sections, again based on the work per processor, and each piece is placed on a processor for optimal load balancing. This option requires that the block size be chosen such that the number of blocks in the x direction equals the number of blocks in the y direction, and that number must be factorable as \(2^n 3^m 5^p\) where \(n, m, p\) are integers. For example, a 16x16 array of blocks, each containing 20x24 grid cells, fills the gx1 grid (\(n=4, m=p=0\)). If either of these conditions is not met, a Cartesian distribution is used instead.
While the Cartesian distribution groups sets of blocks by processor, the ‘roundrobin’ distribution loops through the blocks and processors together, putting one block on each processor until the blocks are gone. This provides good load balancing but poor communication characteristics due to the number of neighbors and the amount of data needed to communicate. The ‘sectrobin’ and ‘sectcart’ algorithms loop similarly, but put groups of blocks on each processor to improve the communication characteristics. In the ‘sectcart’ case, the domain is divided into two (east-west) halves and the loops are done over each, sequentially. Figure 10 provides an overview of the pros and cons for the distribution types.
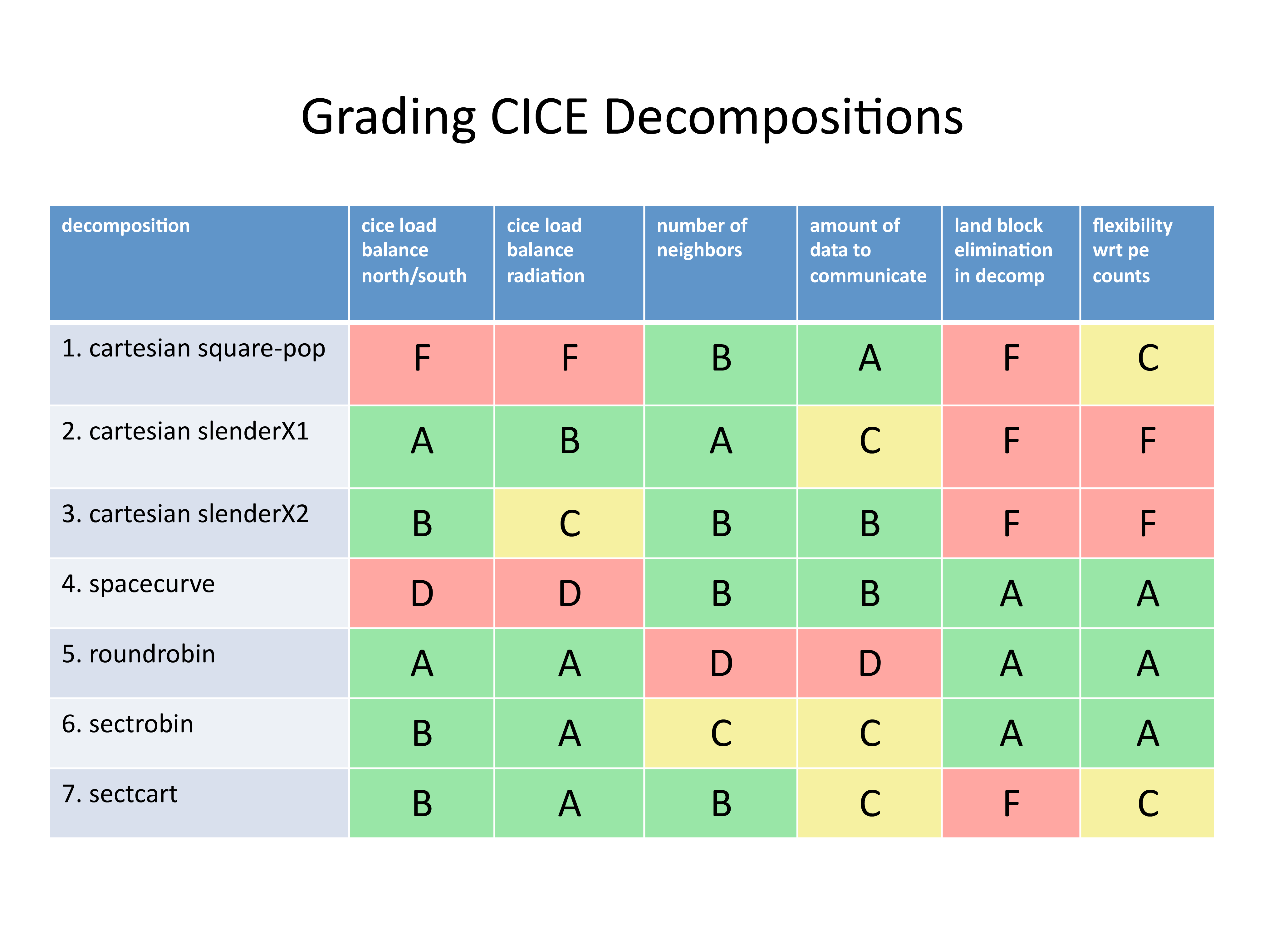
Figure 10
Figure 10 : Scorecard for block distribution choices in CICE, courtesy T. Craig. For more information, see http://www.cesm.ucar.edu/events/ws.2012/Presentations/SEWG2/craig.pdf
The maskhalo options in the namelist improve performance by removing unnecessary halo communications where there is no ice. There is some overhead in setting up the halo masks, which is done during the timestepping procedure as the ice area changes, but this option usually improves timings even for relatively small processor counts. T. Craig has found that performance improved by more than 20% for combinations of updated decompositions and masked haloes, in CESM’s version of CICE. A practical guide for choosing a CICE grid decomposition, based on experience in CESM, is available: http://oceans11.lanl.gov/drupal/CICE/DecompositionGuide
Throughout the code, (i, j) loops have been combined into a single loop, often over just ocean cells or those containing sea ice. This was done to reduce unnecessary operations and to improve vector performance.
Figure 11 illustrates the computational expense of various options, relative to the total time (excluding initialization) of a 7-layer configuration using BL99 thermodynamics, EVP dynamics, and the ‘ccsm3’ shortwave parameterization on the gx1 grid, run for one year from a no-ice initial condition. The block distribution consisted of 20 \(\times\) 192 blocks spread over 32 processors (‘slenderX2’) with no threads and -O2 optimization. Timings varied by about \(\pm3\)% in identically configured runs due to machine load. Extra time required for tracers has two components, that needed to carry the tracer itself (advection, category conversions) and that needed for the calculations associated with the particular tracer. The age tracers (FY and iage) require very little extra calculation, so their timings represent essentially the time needed just to carry an extra tracer. The topo melt pond scheme is slightly faster than the others because it calculates pond area and volume once per grid cell, while the others calculate it for each thickness category.
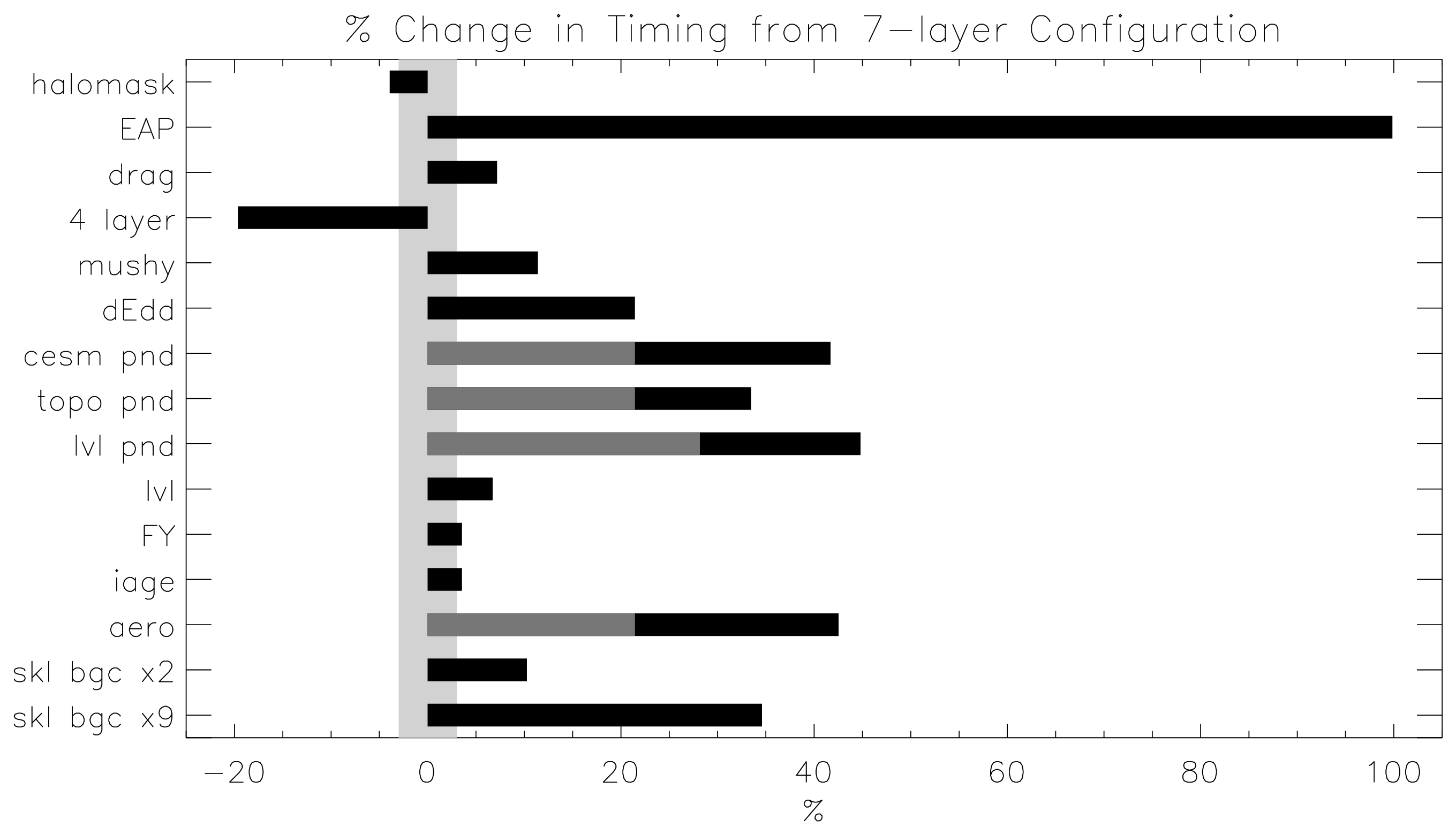
Figure 11
Figure 11 : Change in ‘TimeLoop’ timings from the 7-layer configuration using BL99 thermodynamics and EVP dynamics. Timings were made on a nondedicated machine, with variations of about \(\pm3\)% in identically configured runs (light grey). Darker grey indicates the time needed for extra required options; The Delta-Eddington radiation scheme is required for all melt pond schemes and the aerosol tracers, and the level-ice pond parameterization additionally requires the level-ice tracers.
3.1.3. Initialization and coupling¶
The ice model’s parameters and variables are initialized in several steps. Many constants and physical parameters are set in ice_constants.F90. Namelist variables (Table of namelist options), whose values can be altered at run time, are handled in input_data and other initialization routines. These variables are given default values in the code, which may then be changed when the input file ice_in is read. Other physical constants, numerical parameters, and variables are first set in initialization routines for each ice model component or module. Then, if the ice model is being restarted from a previous run, core variables are read and reinitialized in restartfile, while tracer variables needed for specific configurations are read in separate restart routines associated with each tracer or specialized parameterization. Finally, albedo and other quantities dependent on the initial ice state are set. Some of these parameters will be described in more detail in Table of namelist options.
The restart files supplied with the code release include the core variables on the default configuration, that is, with seven vertical layers and the ice thickness distribution defined by kcatbound = 0. Restart information for some tracers is also included in the restart files.
Three namelist variables control model initialization, ice_ic, runtype, and restart, as described in Table 4. It is possible to do an initial run from a file filename in two ways: (1) set runtype = ‘initial’, restart = true and ice_ic = filename, or (2) runtype = ‘continue’ and pointer_file = ./restart/ice.restart_file where ./restart/ice.restart_file contains the line “./restart/[filename]”. The first option is convenient when repeatedly starting from a given file when subsequent restart files have been written. With this arrangement, the tracer restart flags can be set to true or false, depending on whether the tracer restart data exist. With the second option, tracer restart flags are set to ‘continue’ for all active tracers.
An additional namelist option, restart_ext specifies whether halo cells are included in the restart files. This option is useful for tripole and regional grids, but can not be used with PIO.
MPI is initialized in init_communicate for both coupled and stand-alone MPI runs. The ice component communicates with a flux coupler or other climate components via external routiines that handle the variables listed in Table 1. For stand-alone runs, routines in ice_forcing.F90 read and interpolate data from files, and are intended merely to provide guidance for the user to write his or her own routines. Whether the code is to be run in stand-alone or coupled mode is determined at compile time, as described below.
Table 4 : Ice initial state resulting from combinations of ice_ic, runtype and restart. \(^a\)If false, restart is reset to true. \(^b\)restart is reset to false. \(^c\)ice_ic is reset to ‘none.’
| ice_ic | |||
|---|---|---|---|
| initial/false | initial/true | continue/true (or false\(^a\)) | |
| none | no ice | no ice\(^b\) | restart using pointer_file |
| default | SST/latitude dependent | SST/latitude dependent\(^b\) | restart using pointer_file |
| filename | no ice\(^c\) | start from filename | restart using pointer_file |
3.1.4. Choosing an appropriate time step¶
The time step is chosen based on stability of the transport component (both horizontal and in thickness space) and on resolution of the physical forcing. CICE allows the dynamics, advection and ridging portion of the code to be run with a shorter timestep, \(\Delta t_{dyn}\) (dt_dyn), than the thermodynamics timestep \(\Delta t\) (dt). In this case, dt and the integer ndtd are specified, and dt_dyn = dt/ndtd.
A conservative estimate of the horizontal transport time step bound, or CFL condition, under remapping yields
Numerical estimates for this bound for several POP grids, assuming \(\max(u, v)=0.5\) m/s, are as follows:
| grid label | N pole singularity | dimensions | min \(\sqrt{\Delta x\cdot\Delta y}\) | max \(\Delta t_{dyn}\) |
| gx3 | Greenland | \(100\times 116\) | \(39\times 10^3\) m | 10.8hr |
| gx1 | Greenland | \(320\times 384\) | \(18\times 10^3\) m | 5.0hr |
| p4 | Canada | \(900\times 600\) | \(6.5\times 10^3\) m | 1.8hr |
As discussed in section Mechanical redistribution and [47], the maximum time step in practice is usually determined by the time scale for large changes in the ice strength (which depends in part on wind strength). Using the strength parameterization of [61], as in Equation (83), limits the time step to \(\sim\)30 minutes for the old ridging scheme (krdg_partic = 0), and to \(\sim\)2 hours for the new scheme (krdg_partic = 1), assuming \(\Delta x\) = 10 km. Practical limits may be somewhat less, depending on the strength of the atmospheric winds.
Transport in thickness space imposes a similar restraint on the time step, given by the ice growth/melt rate and the smallest range of thickness among the categories, \(\Delta t<\min(\Delta H)/2\max(f)\), where \(\Delta H\) is the distance between category boundaries and \(f\) is the thermodynamic growth rate. For the 5-category ice thickness distribution used as the default in this distribution, this is not a stringent limitation: \(\Delta t < 19.4\) hr, assuming \(\max(f) = 40\) cm/day.
In the classic EVP or EAP approach (kdyn = 1 or 2, revised_evp = false), the dynamics component is subcycled ndte (\(N\)) times per dynamics time step so that the elastic waves essentially disappear before the next time step. The subcycling time step (\(\Delta t_e\)) is thus
A second parameter, \(E_\circ\) (eyc), defines the elastic wave damping timescale \(T\), described in Section Dynamics, as eyc* dt_dyn. The forcing terms are not updated during the subcycling. Given the small step (dte) at which the EVP dynamics model is subcycled, the elastic parameter \(E\) is also limited by stability constraints, as discussed in [33]. Linear stability analysis for the dynamics component shows that the numerical method is stable as long as the subcycling time step \(\Delta t_e\) sufficiently resolves the damping timescale \(T\). For the stability analysis we had to make several simplifications of the problem; hence the location of the boundary between stable and unstable regions is merely an estimate. In practice, the ratio \(\Delta t_e ~:~ T ~:~ \Delta t\) = 1 : 40 : 120 provides both stability and acceptable efficiency for time steps (\(\Delta t\)) on the order of 1 hour.
For the revised EVP approach (kdyn = 1, revised_evp = true), the relaxation parameter arlx1i effectively sets the damping timescale in the problem, and brlx represents the effective subcycling [8]. In practice the parameters \(S_e>0.5\) and \(\xi<1\) are set, along with an estimate of the ice strength per unit mass, and the damping and subcycling parameters are then calculated. With the addition of the revised EVP approach to CICE, the code now uses these parameters internally for both classic and revised EVP configurations (see Section Revised approach).
Note that only \(T\) and \(\Delta t_e\) figure into the stability of the dynamics component; \(\Delta t\) does not. Although the time step may not be tightly limited by stability considerations, large time steps (e.g., \(\Delta t=1\) day, given daily forcing) do not produce accurate results in the dynamics component. The reasons for this error are discussed in [33]; see [37] for its practical effects. The thermodynamics component is stable for any time step, as long as the surface temperature \(T_{sfc}\) is computed internally. The numerical constraint on the thermodynamics time step is associated with the transport scheme rather than the thermodynamic solver.
3.1.5. Model output¶
3.1.5.1. History files¶
Model output data is averaged over the period(s) given by histfreq and histfreq_n, and written to binary or files prepended by history_file in ice_in. That is, if history_file = ‘iceh’ then the filenames will have the form iceh.[timeID].nc or iceh.[timeID].da, depending on the output file format chosen in comp_ice (set IO_TYPE). The history files are CF-compliant; header information for data contained in the files is displayed with the command ncdump -h filename.nc. Parallel output is available using the PIO library; the attribute io_flavor distinguishes output files written with PIO from those written with standard netCDF. With binary files, a separate header file is written with equivalent information. Standard fields are output according to settings in the icefields_nml namelist in ice_in. The user may add (or subtract) variables not already available in the namelist by following the instructions in section Adding History fields.
With this release, the history module has been divided into several modules based on the desired formatting and on the variables themselves. Parameters, variables and routines needed by multiple modules is in ice_history_shared.F90, while the primary routines for initializing and accumulating all of the history variables are in ice_history.F90. These routines call format-specific code in the io_binary, io_netcdf and io_pio directories. History variables specific to certain components or parameterizations are collected in their own history modules (ice_history_bgc.F90, ice_history_drag.F90, ice_history_mechred.F90, ice_history_pond.F90).
The history modules allow output at different frequencies. Five output frequencies (1, h, d, m, y) are available simultaneously during a run. The same variable can be output at different frequencies (say daily and monthly) via its namelist flag, f_ \(\left<{var}\right>\), which is now a character string corresponding to histfreq or ‘x’ for none. (Grid variable flags are still logicals, since they are written to all files, no matter what the frequency is.) If there are no namelist flags with a given histfreq value, or if an element of histfreq_n is 0, then no file will be written at that frequency. The output period can be discerned from the filenames.
For example, in namelist:
`histfreq` = ’1’, ’h’, ’d’, ’m’, ’y’
`histfreq\_n` = 1, 6, 0, 1, 1
`f\_hi` = ’1’
`f\_hs` = ’h’
`f\_Tsfc` = ’d’
`f\_aice` = ’m’
`f\_meltb` = ’mh’
`f\_iage` = ’x’
Here, hi will be written to a file on every timestep, hs will be written once every 6 hours, aice once a month, meltb once a month AND once every 6 hours, and Tsfc and iage will not be written.
From an efficiency standpoint, it is best to set unused frequencies in histfreq to ‘x’. Having output at all 5 frequencies takes nearly 5 times as long as for a single frequency. If you only want monthly output, the most efficient setting is histfreq = ’m’,’x’,’x’,’x’,’x’. The code counts the number of desired streams (nstreams) based on histfreq.
The history variable names must be unique for netcdf, so in cases where a variable is written at more than one frequency, the variable name is appended with the frequency in files after the first one. In the example above, meltb is called meltb in the monthly file (for backward compatibility with the default configuration) and meltb_h in the 6-hourly file.
Using the same frequency twice in histfreq will have unexpected consequences and currently will cause the code to abort. It is not possible at the moment to output averages once a month and also once every 3 months, for example.
If write_ic is set to true in ice_in, a snapshot of the same set of history fields at the start of the run will be written to the history directory in iceh_ic.[timeID].nc(da). Several history variables are hard-coded for instantaneous output regardless of the averaging flag, at the frequency given by their namelist flag.
The normalized principal components of internal ice stress are computed in principal_stress and written to the history file. This calculation is not necessary for the simulation; principal stresses are merely computed for diagnostic purposes and included here for the user’s convenience.
Several history variables are available in two forms, a value representing an average over the sea ice fraction of the grid cell, and another that is multiplied by \(a_i\), representing an average over the grid cell area. Our naming convention attaches the suffix “_ai” to the grid-cell-mean variable names.
3.1.5.2. Diagnostic files¶
Like histfreq, the parameter diagfreq can be used to regulate how often output is written to a log file. The log file unit to which diagnostic output is written is set in ice_fileunits.F90. If diag_type = ‘stdout’, then it is written to standard out (or to ice.log.[ID] if you redirect standard out as in run_ice); otherwise it is written to the file given by diag_file. In addition to the standard diagnostic output (maximum area-averaged thickness, velocity, average albedo, total ice area, and total ice and snow volumes), the namelist options print_points and print_global cause additional diagnostic information to be computed and written. print_global outputs global sums that are useful for checking global conservation of mass and energy. print_points writes data for two specific grid points. Currently, one point is near the North Pole and the other is in the Weddell Sea; these may be changed in ice_in.
Timers are declared and initialized in ice_timers.F90, and the code to be timed is wrapped with calls to ice_timer_start and ice_timer_stop. Finally, ice_timer_print writes the results to the log file. The optional “stats” argument (true/false) prints additional statistics. Calling ice_timer_print_all prints all of the timings at once, rather than having to call each individually. Currently, the timers are set up as in Table 5. Section Adding Timers contains instructions for adding timers.
The timings provided by these timers are not mutually exclusive. For example, the column timer (5) includes the timings from 6–10, and subroutine bound (timer 15) is called from many different places in the code, including the dynamics and advection routines.
The timers use MPI_WTIME for parallel runs and the F90 intrinsic system_clock for single-processor runs.
Table 5 : CICE timers
| Timer | ||
| Index | Label | |
| 1 | Total | the entire run |
| 2 | Step | total minus initialization and exit |
| 3 | Dynamics | EVP |
| 4 | Advection | horizontal transport |
| 5 | Column | all vertical (column) processes |
| 6 | Thermo | vertical thermodynamics |
| 7 | Shortwave | SW radiation and albedo |
| 8 | Meltponds | melt ponds |
| 9 | Ridging | mechanical redistribution |
| 10 | Cat Conv | transport in thickness space |
| 11 | Coupling | sending/receiving coupler messages |
| 12 | ReadWrite | reading/writing files |
| 13 | Diags | diagnostics (log file) |
| 14 | History | history output |
| 15 | Bound | boundary conditions and subdomain communications |
| 16 | BGC | biogeochemistry |
3.1.5.3. Restart files¶
CICE now provides restart data in binary unformatted or formats, via the IO_TYPE flag in comp_ice and namelist variable restart_format. Restart and history files must use the same format. As with the history output, there is also an option for writing parallel restart files using PIO.
The restart files created by CICE contain all of the variables needed for a full, exact restart. The filename begins with the character string ‘iced.’, and the restart dump frequency is given by the namelist variables dumpfreq and dumpfreq_n. The pointer to the filename from which the restart data is to be read for a continuation run is set in pointer_file. The code assumes that auxiliary binary tracer restart files will be identified using the same pointer and file name prefix, but with an additional character string in the file name that is associated with each tracer set. All variables are included in restart files.
Additional namelist flags provide further control of restart behavior. dump_last = true causes a set of restart files to be written at the end of a run when it is otherwise not scheduled to occur. The flag use_restart_time enables the user to choose to use the model date provided in the restart files. If use_restart_time = false then the initial model date stamp is determined from the namelist parameters. lcdf64 = true sets 64-bit output, allowing larger file sizes with version 3.
Routines for gathering, scattering and (unformatted) reading and writing of the “extended” global grid, including the physical domain and ghost (halo) cells around the outer edges, allow exact restarts on regional grids with open boundary conditions, and they will also simplify restarts on the various tripole grids. They are accessed by setting restart_ext = true in namelist. Extended grid restarts are not available when using PIO; in this case extra halo update calls fill ghost cells for tripole grids (do not use PIO for regional grids).
Two restart files are included with the CICE v5 code distribution, for the gx3 and gx1 grids. The were created using the default model configuration (settings as in comp_ice and ice_in), but initialized with no ice. The gx3 case was run for 1 year using the 1997 forcing data provided with the code. The gx1 case was run for 20 years, so that the date of restart in the file is 1978-01-01. Note that the restart dates provided in the restart files can be overridden using the namelist variables use_restart_time, year_init and istep0. The forcing time can also be overridden using fyear_init.
Several changes in CICE v5 have made restarting from v4.1 restart files difficult. First, the ice and snow enthalpy state variables are now carried as tracers instead of separate arrays, and salinity has been added as a necessary restart field. Second, the default number of ice layers has been increased from 4 to 7. Third, netcdf format is now used for all I/O; it is no longer possible to have history output as and restart output in binary format. However, some facilities are included with CICE v5 for converting v4.1 restart files to the new file structure and format, provided that the same number of ice layers and basic physics packages will be used for the new runs. See Section Restarts for details.